u-boot 2016.7之以太网驱动模型
背景
u-boot 2016.7引入了设备树(device tree) 和 驱动模型DM(driver model),这为设备的驱动的定义和访问接口提供了统一的方法,提高了驱动之间的兼容性和可移植性。具体建议参考/doc/driver-model/README.txt。
对于u-boot2016.7的以太网络驱动,也属于DM应用的一个范例,此篇着重介绍u-boot2016.7的DM 模型及网络驱动模型的细节,关于设备树(device tree)的相关细节,在后续篇章中进行介绍。
1、使能DM功能
在配置u-boot时,使能DM功能,即在/configs/xxx_defconfig中定义了:CONFIG_DM=y;
在配置u-boot时,使能网络设备的DM功能,即在/configs/xxx_defconfig中定义了:CONFIG_DM_NET=y;
2、DM整体框架
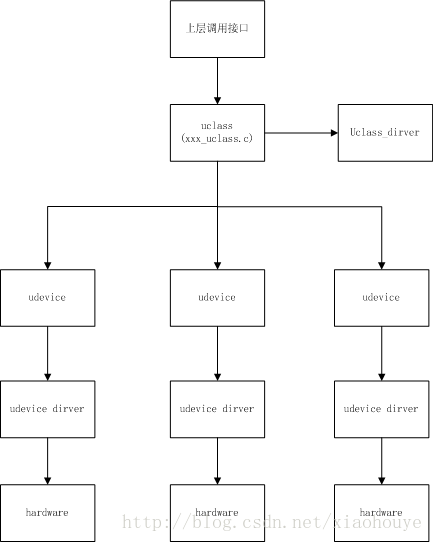
DM 主要有udevice、dirver、uclass、uclass_dirver四部分组成,其中:
udevice:是指设备对象,类似可以理解为kernel中的device。
dirver:是udevice的驱动,和底层硬件设备通信,并且为上层提供设备操作接口。
uclass:使用相同方式的操作集的device的组。相当于是一种抽象。uclass为使用相同接口的设备提供了统一的接口。
uclass_dirver:对应uclass的驱动程序。主要提供uclass操作时,如bind和probe udevice时的一些操作。
其调用关系见图2:
3、数据结构和dirver声名
DM 主要有udevice、dirver、uclass、uclass_dirver四部分组成,相应与之对应的有四个数据结构struct udevice、struct dirver、struct uclass、struct uclass_dirver。
对于dirver和uclass_dirver的声明,u-boot提供了:
1 | |
和
1 | |
4、u-boot 2016.7网络驱动模型
一般以太网的硬件原理框图见图2: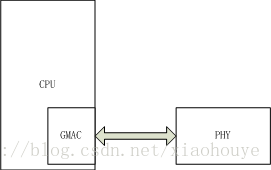
以太网的网络驱动模型是DM模型的具体体现,其模型框图见图3: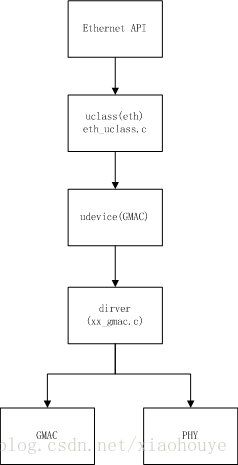
5、u-boot 2016.7网络初始化流程
u-boot 2016.7的网络初始化流程见图4: 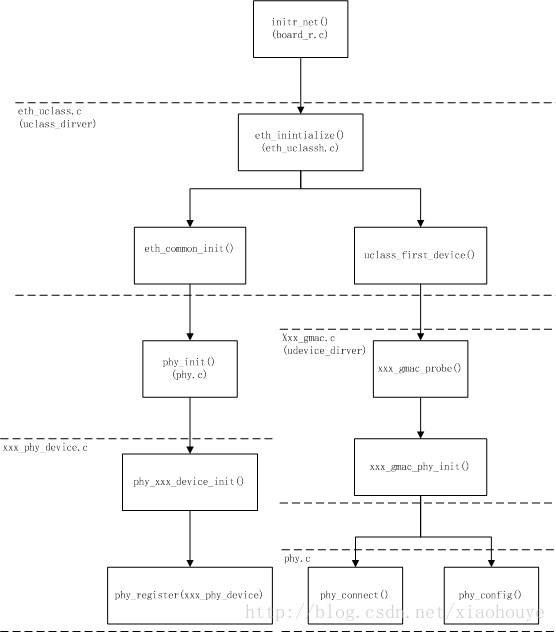
其中xxx_gmac.c和xxx_phy_device.c是硬件平台相关的文件,xxx_gmac.c提供了gmac的对gmac的初始化和对gmac的操作接口及对phy芯片的配置,xxx_phy_device.c提供phy芯片的操作接口以及向u-boot注册phy设备。
当把u-boot移植到新平台或新的板级平台时,若u-boot中没有集成相应的mac控制器驱动或phy芯片驱动时,需手动完成xxx_gmac.c和xxx_phy_device.c并添加。